 Kurz vorweg für die Nicht-Modellbahner, sonst gibt’s wieder Gemecker
Kurz vorweg für die Nicht-Modellbahner, sonst gibt’s wieder Gemecker ![]() :
:
Bei der aktuell wahrscheinlich gängigsten Technik mit fahrenden PKW und LKW auf Modellbahnen, werden diese durch ein Magnetfeld in der Straße gestoppt, welches ein im Wagen montiertes, magnetempfindliches Bauteil ansteuert. In der Regel ein Reedschalter im Auto und ein Elektromagnet in der Straße. Das mal ganz grob umrissen, es gibt durchaus noch weitere Variationen.
Zum Thema:
Seit ich begonnen habe, über die Testanlage zu berichten, kommen verstärkt Fragen zum Car System, speziell zum Stoppen und starten mit Spulen. Ich will mich jetzt nicht groß um Henry und Gauß kümmern, eher um „geht und geht nicht“. Die Spulen werden mit Gleichspannung betrieben, sind als Stoppstelle also eher ohmsche Last. Stromaufnahmen habe ich mit ca. 16V Spannung bisher bei maximal 180mA und minimal 60mA unter zuverlässiger Funktion erlebt, die Grenzen sind wahrscheinlich da noch nicht erreicht. Je nach Spulentyp sind im Schaltmoment allerdings schon erhebliche Induktionen vorgekommen, Freilaufdioden und Stützkondesatoren sind in der Steuerelektronik mit Sorgfalt zu betrachten. Es ist sehr vieles möglich, nicht alles macht Sinn, auch wenn die Funktion an sich vorhanden ist.
Nun, dies ist genau einer der Gründe, warum die Testanlage überhaupt ins Leben gerufen ist. Ich bin gerade dabei, möglichst viele Varianten von Magnetfeldern zu realisieren um auszutesten, womit man Fahrzeuge stoppen kann, wenn sie nach dem Faller Car System arbeiten.
Meine Testvorgaben dabei:
- Versorgung mit 19V/DC aus einem Notebooknetzteil. Das schafft über 3A und kostet in der Restposten-Wühlkiste nur ein paar Euro. Ich bin nämlich immer noch nicht bereit, Fantasiepreise für umgelabelte Standardelektronik zu bezahlen. Nebenbei kann man aus 19V so ziemlich jede Spannung generieren, die eine Modellbahn braucht.
- Diverse Schaltungen im Bereich von ca. 5-19V, um das Verhalten der Spulen und Magnetfelder zu testen. Diese Schaltungen entstehen im Eigenbau, meist mit einem PIC-Mikrocontroller als „Gehirn“. Wenn ich irgendwann finale Ergebnisse habe, kommen die Dokumentationen hier in den Blog *².
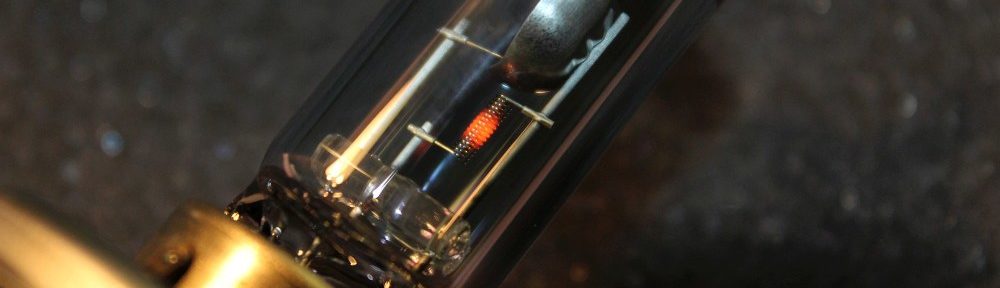
- Diverse Spulen aus Relais und allem, wo etwas passendes zu finden ist.
- Kerne für/in den Spulen aus Schrauben und Gewindestangen.
- Postion der Mitte des Spulenkernes: 11mm rechts von der Fahrbahnmitte
Das Ganze ist eine langwierige Aufgabe, letztendlich muss die Schaltung entstehen, das Programm geschrieben und vor allem die Stoppstelle in die Anlage eingebaut werden.
Ständige Variablen dabei:
- Stoppverhalten der Fahrzeuge.
- Dicke der Fahrbahn.
- Magnetische Eigenschaften des Kerns.
 Wahrscheinlich gibt es kaum eine Möglichkeit, alle Kombinationen durchzutesten. Ich kann alleine aus einem Pool von rund 80 Car-System-kompatiblen LKW und PKW schöpfen, welche zum Teil Eigenbauten und auch „von der Stange“ gekauft sind. Fazit: Fast alle haben ihr ganz eigenes Stoppverhalten. Wenn das Magnetfeld der Stoppstelle nun hart an der Grenze arbeitet, kann es vorkommen, dass eben doch mal ein Kandidat einfach durchfährt oder ggf. nicht mehr startet (Parkplatz). Meist wird die Grenze von der Positionierung der Spule und der angelegten Spannung im Zusammenspiel mit dem Kern und dessen Entfernung zur Fahrbahndecke gebildet.
Wahrscheinlich gibt es kaum eine Möglichkeit, alle Kombinationen durchzutesten. Ich kann alleine aus einem Pool von rund 80 Car-System-kompatiblen LKW und PKW schöpfen, welche zum Teil Eigenbauten und auch „von der Stange“ gekauft sind. Fazit: Fast alle haben ihr ganz eigenes Stoppverhalten. Wenn das Magnetfeld der Stoppstelle nun hart an der Grenze arbeitet, kann es vorkommen, dass eben doch mal ein Kandidat einfach durchfährt oder ggf. nicht mehr startet (Parkplatz). Meist wird die Grenze von der Positionierung der Spule und der angelegten Spannung im Zusammenspiel mit dem Kern und dessen Entfernung zur Fahrbahndecke gebildet.
 Ich habe bisher schon erfolgreich ausgediente Relaisspulen mit 3mm Gewindestange als Kern verwendet, ebenso aber Spulen unbekannter Herkunft mit 10mm Schrauben. Geht alles, eher eine Frage des Feintunings. Wer eine größere Anlage mit fahrenden Autos plant, sollte einfach ausgedehnte Tests als gegeben hinnehmen, jedenfalls wenn er oder sie ordentlich Geld sparen will. Natürlich sollte man Bauteile, welche z. B. aus einem 5V-Relais stammen, nicht unbedingt mit 16V befeuern, das geht wahrscheinlich schief
Ich habe bisher schon erfolgreich ausgediente Relaisspulen mit 3mm Gewindestange als Kern verwendet, ebenso aber Spulen unbekannter Herkunft mit 10mm Schrauben. Geht alles, eher eine Frage des Feintunings. Wer eine größere Anlage mit fahrenden Autos plant, sollte einfach ausgedehnte Tests als gegeben hinnehmen, jedenfalls wenn er oder sie ordentlich Geld sparen will. Natürlich sollte man Bauteile, welche z. B. aus einem 5V-Relais stammen, nicht unbedingt mit 16V befeuern, das geht wahrscheinlich schief ![]()
*² Ich werde immer wieder mal meine Ergebnisse bloggen, aber „eben schnell“ wird das eher nicht ![]() Das Gleiche gilt auch für die Elektronik und ähnliches, die Berichte kommen auch erst online, wenn alles so narrensicher wie möglich ist. Ich weiß, dass hier im Blog einige unbeendete Projekte schlummern, eben diese hoffe ich mit Hilfe der Testanlage fertigstellen zu können, manches geht leider nur am Lötkolben nicht, es muss eben eine Testanlage da sein
Das Gleiche gilt auch für die Elektronik und ähnliches, die Berichte kommen auch erst online, wenn alles so narrensicher wie möglich ist. Ich weiß, dass hier im Blog einige unbeendete Projekte schlummern, eben diese hoffe ich mit Hilfe der Testanlage fertigstellen zu können, manches geht leider nur am Lötkolben nicht, es muss eben eine Testanlage da sein ![]() Nebenbei empfinde ich die Steuerung der Autos mit Spulen im Jahr 2016 auch als eher überholt, sie ist nur eben an vielen Stellen vorzufinden. Wenn ich sicher sein kann, dass meine Aufbauten einen relevanten Testbetrieb ermöglichen, wird verstärkt an Alternativen gearbeitet, wahrscheinlich werde ich mein IrDiS-Projekt doch wieder aufleben lassen. Da funktioniert ja an sich schon alles, es fehlt nur vorne und hinten am Feintuning
Nebenbei empfinde ich die Steuerung der Autos mit Spulen im Jahr 2016 auch als eher überholt, sie ist nur eben an vielen Stellen vorzufinden. Wenn ich sicher sein kann, dass meine Aufbauten einen relevanten Testbetrieb ermöglichen, wird verstärkt an Alternativen gearbeitet, wahrscheinlich werde ich mein IrDiS-Projekt doch wieder aufleben lassen. Da funktioniert ja an sich schon alles, es fehlt nur vorne und hinten am Feintuning ![]()





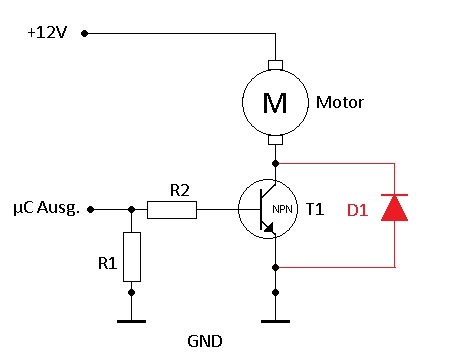
 Immer wenn ich einen Beitrag zum Mikrocontroller (wenn der eine größere Last schalten muss) schreibe, kommen Anfragen zum ‚womit und wie?‘. Im Prinzip bediene ich mich aber immer der gleichen Schaltung, nur mit angepassten Bauteilen.
Immer wenn ich einen Beitrag zum Mikrocontroller (wenn der eine größere Last schalten muss) schreibe, kommen Anfragen zum ‚womit und wie?‘. Im Prinzip bediene ich mich aber immer der gleichen Schaltung, nur mit angepassten Bauteilen.