 Servosteuerung ohne Schickschnack
Servosteuerung ohne Schickschnack
Sie funktioniert, macht alles, was ich von ihr erwartet habe und dennoch ->
Diese Servosteuerung ist eine „Quick & Dirty“ Lösung 
 Ich habe einfach auf die Schnelle eine Lösung gesucht, welche via Tasterdruck einen analogen Servo von einem Ende zu anderen fährt.
Ich habe einfach auf die Schnelle eine Lösung gesucht, welche via Tasterdruck einen analogen Servo von einem Ende zu anderen fährt.
Zusätzlich mussten diese Endpunkte justierbar und das Ganze schnell aufzubauen, aber erweiterbar sein. Was soll ich schreiben, das ist mein Entwurf…
(Stromlaufplan geändert, die Verbindung von S1 muss direkt zum PIC gehen, ist in der gezeigten Version schon korrigiert, also nur interessant für Leser, die den alten Plan noch genutzt haben! Sorry, da hatte ich gepennt )
Da es alles erfüllt, was es soll und da ich gelegentlich nach so einer Schaltung gefragt werde, kommt das Miniprojekt in den Blog. Stromlaufplan und .hex File für einen Pic 16F688 sind als Download unten, bzw. als Bild oben verfügbar.
Vorteil:
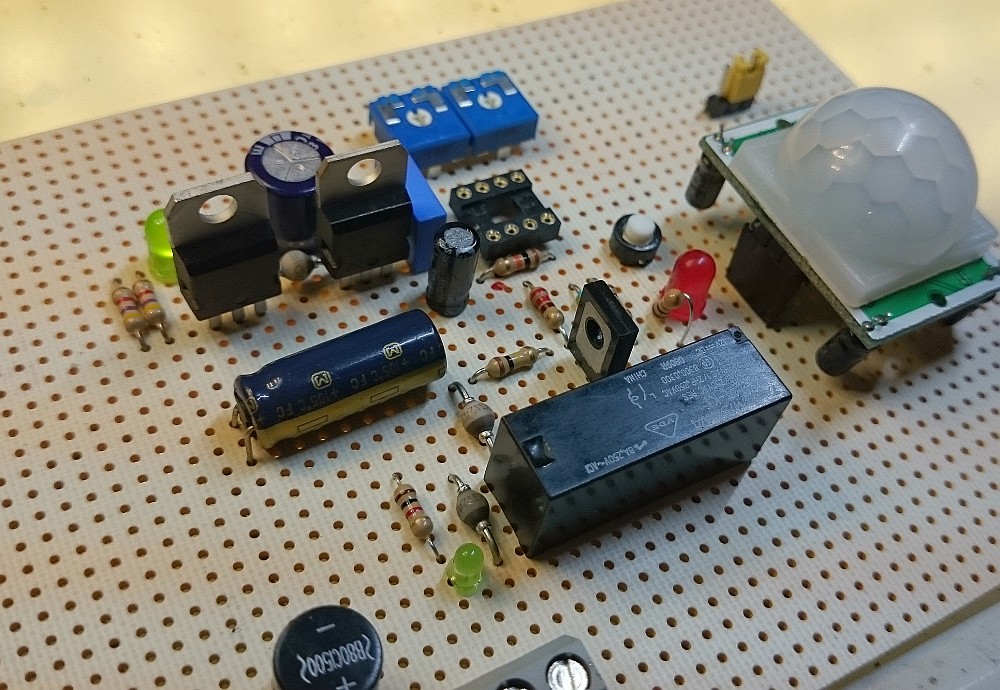
- 11 Bauteile
- Schnell aufgebaut
- Taster zieht nach GND, Hall-Sensoren, Reedschalter & Co unkompliziert nutzbar
- Billig
Nachteil:
- Überlauf der Trimmer in der Software nicht abgefangen, bei Endanschlag des Einstellers dreht der Servo um
- Keinerlei Überlastschutz
- Nachbau auf eigene Gefahr

Funktion:
5V auf die Schaltung geben, Taster drücken, Servo fährt in eine Endstellung.
Mit Trimmer Position einstellen. Neuer Tastendruck, Servo fährt in die andere Position, wieder justieren mit dem anderen Trimmer – fertig.
Vorsichtig einstellen! Die Trimmererfassung ist nur sehr rudimentär eingebunden, eben „Quick & Dirty“  Die LEDs zeigen an, an welchem Ende der Servo sich befindet.
Die LEDs zeigen an, an welchem Ende der Servo sich befindet.
Bauteile:
Die Bauteile sind an sich nicht kritisch.
Die LEDs können auch weiß oder purpurviolettpink sein, total egal
Die Trimmer (R5/R6) dürften auch bei 4k7 oder 10k noch brauchbare Werte liefern, habe ich nicht anders versucht. R1 und R2 würde ich nicht höher 15k und kleiner 8k6 wählen, ist aber eher ein Erfahrungswert. R3 und R4 müssen zu den verwendeten Leuchtdioden passen, mit 220R wird man nichts verkehrt machen, Rest siehe Schaltbild
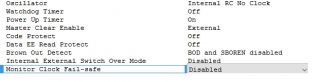 Die Config-Bits sind NICHT(!) im Programm, ich hänge sie links als Bild dran, beim PIC programmieren beachten!
Die Config-Bits sind NICHT(!) im Programm, ich hänge sie links als Bild dran, beim PIC programmieren beachten!
>> Dowload .hex und Stromlaufplan qd.zip <<
Wenn mal Zeit ist, werde ich vielleicht eine bessere Version erstellen, mehr brauch‘ ich im Moment einfach nicht…
Man kann eben sehr viel (un)sinnvolles Zeug machen mit den Servos
 Ich weiß leider nicht, wie lange die Seite bei „Microchip“ online und aktuell bleibt, jedenfalls hinterlege ich hier den Link, der zu den gesammelten Dowloads für den PICkit-2 Programmer führt.
Ich weiß leider nicht, wie lange die Seite bei „Microchip“ online und aktuell bleibt, jedenfalls hinterlege ich hier den Link, der zu den gesammelten Dowloads für den PICkit-2 Programmer führt.







 Kleine Elektronikübung am Rande
Kleine Elektronikübung am Rande 













 Das nächste Register: PIR1, liegt in Bank 0.
Das nächste Register: PIR1, liegt in Bank 0.